Actualitat
El Stockholm International Peace Research Institute (SIPRI) ha publicat avui les noves dades sobre la despesa militar global corresponents a l'any 2023, una xifra que creix per novè any consecutiu...
22/04/2024
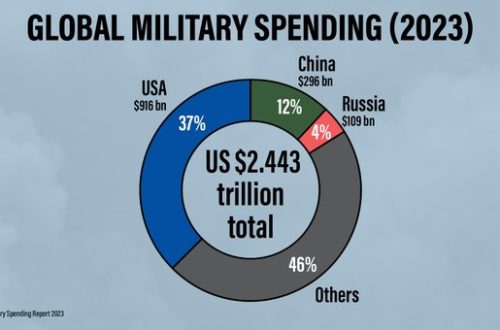
El Stockholm International Peace Research Institute (SIPRI) ha publicat avui les noves dades sobre la despesa militar global corresponents a l'any 2023, una xifra que creix per novè any consecutiu fins a assolir els 2,44 bilions de dòlars, un augment del 6,8% en termes reals (3,7% l'any anterior). En el marc dels Dies Globals d'Acció sobre la Despesa Militar (GDAMS,...


La experta en militarización de fronteras cuestiona el papel real de Frontex, una agencia internacional creada para apuntalar la Europa-fortaleza que da la espalda a los derechos humanos En octubre...



22/04/2024
La despesa militar mundial arriba a la xifra rècord de 2,44 bilions de dòlars, fet que suposa un augment en termes reals del 6,8%. Els EUA amb el 37% del total i l'OTAN amb el 55% mantenen una hegemonia militar mundial inqüestionable. Segons les noves dades publicades pel SIPRI, la despesa militar espanyola va augmentar gairebé un 10% el 2023,...
14 abril, 2024, 9:00 pm
El cap de setmana del 13 i 14 d’abril, Coma-ruga acollirà el segon bloc de la 4a Escola Pacifista del Centre Delàs. L’edició de 2024 d’aquest cicle formatiu, sota el títol “Aturem el negoci de la guerra, repensem la seguretat”, tindrà lloc durant dos caps de setmana de març i abril a Barcelona i Coma-ruga i està adreçada a persones...

14/02/2024
El pressupost de Frontex s'ha multiplicat per vuit entre el 2012 i el 2022, passant de 89,58 milions a 754 milions d'euros. El pressupost per a les operacions de retorn de l'agència europea ha passat de 80.000 euros el 2005 a més de 69 milions el 2020. “Frontex no només augmenta en pressupost, també augmenta en efectius. Ha passat de...

23/01/2023
Podeu llegir la newsletter completa de desembre de 2022 aquí.

Ainhoa Ruiz Benedicto, Maria Fraile
08/02/2024